Главная »
Датчик положения ротора своими руками Датчик положения ротора своими руками
Далее, как только ротор начал вращаться, его магнитное поле пересекает обмотку статора и наводит в ней противо-ЭДС, по параметрам которой определяется положение ротора при помощи датчика положения ротора плата ДПР. При условии, что положение ротора стабильно и чётко определяется, происходит смена режима работы с синхронного на вентильный. При этом напряжение на выходе СУ остаётся неизменным и равно напряжению синхронизации, а частота вращения вала устанавливается на некотором заранее не известном значении примерно Гц , и будет варьироваться в зависимости от нагрузки на валу, напряжения отпайки ТМПН, потерь в кабельной линии и т. Другими словами, частота вращения вала установится на таком значении, при котором за счёт фактического напряжения синхронизации на обмотке двигателя при фактическом моменте на валу будет обеспечиваться оптимальный угол отставания ротора от магнитного поля статора.
Принцип работы синхронной машины
Электровелосипед своими руками: контроллер. Как выбрать контроллер для электровелосипеда, какие контроллеры бывают и в чём их разница? Прежде чем ответить на этот вопрос, давайте разберёмся, зачем вообще нужен контроллер.
Поиск Настройки. Время на прочтение 17 мин. Термин «векторное управление» электродвигателями знаком всем, кто хоть как-то интересовался вопросом, как с помощью микроконтроллера управлять двигателем переменного тока. Однако обычно в любой книге по электроприводу глава про векторное управление находится где-нибудь ближе к концу, состоит из кучи волосатых формул с отсылками ко всем остальным главам книги.
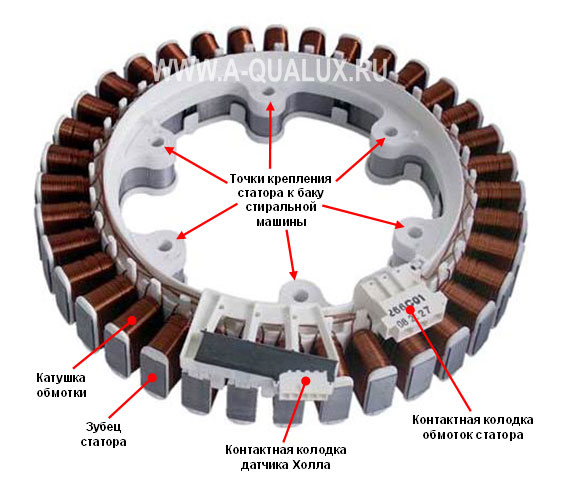
Мне выделили новенький! Буду его перематывать по отельной катушке на каждый зубец. Статор будет именно так, как у вас на картинке. А ротор останется без изменений. Я не буду делать шаговый двигатель. Я буду делать именно асинхронный двигатель.

 MK • Geely MK выбирают")